你每天早上过马路,需要同期算澄莹对面那辆车的车速、距离和你走完斑马线所需的 3.5 秒吗?
虽然不需要。你只会快速看一眼,心里默然判断一个要道问题:「车会不会撞到我?」然后决定是走照旧停。
扫数进程不到一秒,蹧跶的能量聊胜于无。但今天的机器东说念主,简直齐在作念前一种事。
它们被设定为按固定频率来预计全国的下一秒,每秒 30 次、50 次,哪怕明知说念接下来的 0.5 秒什么齐没发生,它也必须算完。
这就像你每天早上外出前,齐要完满预计一遍过马路的 300 个设施才敢迈出第一步。
累不累?虽然累。
要道是,大部分预计齐是空费的。
这即是现时机器东说念主「时灵时不灵」的根底原因之一:
它们太听话了,听话到对每一帧、每一秒齐平均用劲,从不问我方「什么事值得想,什么事无须想」。
5 月 29 日,自变量机器东说念主推出首个具备「事件级预计材干」的全国模子:Wall-WM。
它的中枢即是跳出「依时间均匀采样」的旧范式,模子不再机械地预计每一帧,而是判断哪些眨眼间真确首要。
换句话说,Wall-WM 让机器东说念主终于学会了「捏要点」。
可是,这个全国模子的推出,到底意味着什么?
为什么「捏要点」这种东说念主类与生俱来的材干,放到机器东说念主身上就成了底层时期翻新?要回话这些问题,得先从机器东说念主「大脑」的职责款式提及。
1、从机械效法到真确汇集,Wall-WM 是如何作念到的?
目下行业主流的机器东说念主「大脑」叫 VLA(视觉-谈话-算作)。听名字就知说念,一个崇敬「看」,一个崇敬「听懂东说念主话」,一个崇敬「动手」。
听起来挺合理,但问题在于,这三个模块是串联的:视觉模块把看到的东西传给谈话模块,谈话模块汇集后再传给算作模块。每传一次,信息就打一次扣头。
这即是为什么好多机器东说念主看起来很「笨」。不是因为它没看到,而是因为它看到的信息在传到「动手」模块时,照旧丢失了一泰半。那有莫得什么办法不错考订?
自变量机器东说念主给出的谜底是,通过 Wall-WM 这一生界模子,先换掉它念念考的时辰单元。
传统模子按固定频率预计改日,每秒 30 次、50 次,每一帧齐用劲。哪怕接下来的 0.5 秒什么齐没发生,它也必须算完,这叫「帧级预计」。
但自变量机器东说念主换了一套逻辑:以「事件」为单元来预计。
什么是事件?伸手、捏取、拿起、出动、扬弃,这些在一段时辰内连贯、有明确深嗜的算作片断,即是事件。
模子只辞全国发生「首要变化」时才从头调整预计。
比如「杯子运行滑落」是一个事件,「手遭遇了杯子」是另一个事件。其他时辰,它不需要每秒念念考 30 次。
更首要的是,它学到的不是「第 10-20 帧我要实行教导 X」,而是在此事件下,物理全国将如何演化、我应当如何实行。
但这里有一个掩蔽的贫苦:
如若让机器东说念主在学新算作的同期,把本来好抑止易学会的视觉材干给忘掉了,如何办?Wall-WM 在联想上专门接头了这个「学新不忘旧」的问题。
Wall-WM 的联想很奥妙。它的视觉模块和算作模块不是平起平坐的,而是单向耦合:
算作模块只可读取视觉模块的信息,但弗成反向滋扰它。就像你看书的时候不错记条记,但记条记不会把书上的字改掉。
这么一来,在大范围试验时,模子既能保留原有的视觉汇集材干,又能让算作材干赓续增长。工程师也不需要提前「猜」算作该如何编码,因为模子我方会学出来。
但处理了「学新不忘旧」,Wall-WM 还要处理另一个老问题:机器东说念主身上有好几个录像头,它如何知说念它们拍到的其实是团结个东西?
大多量机器东说念主身上不啻一个录像头,比如头顶一个、左手腕一个、右手腕一个。问题是,它如何知说念这三个录像头拍到的画面是对应团结个物体的?
传统作念法是让模子我方去学对应关系。
但成果往往不好:模子会偷懒,把跨视角珍主见当成一个通用特征搀杂器,而不是真确去汇集空间几何。
因此,Wall-WM 引入了两个机制:
视锥掩码和管状掩码。
视锥掩码从物理层面告诉模子:这两个录像头的画面在空间上根底不可能对应,别良友去学它们的关系。
管状掩码则反过来「免强」模子去学那些真确应该对应的区域,它会特意讳饰一个录像头里的某块区域,逼模子从其他录像头找到疏浚的内容。
一个往常的汇集:普通 AI 看东西是「二维拼图」,每一张画面齐是孤苦的平面。
而 Wall-WM 看东西是「三维积木」,百家乐2026世界杯中国官方下载它知说念不同角度的画面拼起来是一个立体的物体。哪怕某个角度被讳饰了,它也能「脑补」出物体真实凿位置。
看懂空间、汇集事件,Wall-WM 在「想什么」上照旧比传统模子前进了一大步。但机器东说念主光会想还不够,它还得想得快,毕竟确凿全国不等东说念主。
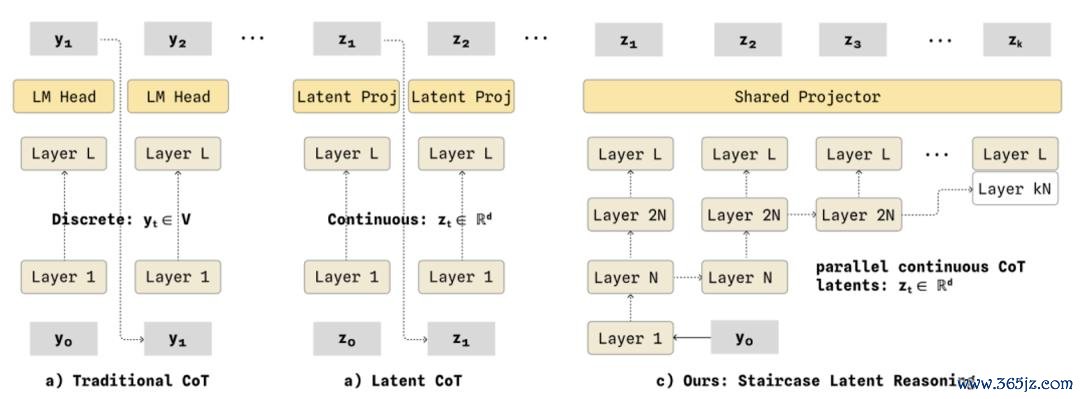
机器东说念主在作念复杂任务时,往往需要「念念维链」(CoT),也即是在脑子里先推理一遍再活动。
但传统 CoT 是一步一步推理的,想完第一步,才能想第二步,极端慢。
Wall-WM 的作念法是:
底层只跑一次,高层像路线同样并行伸开。况且最要道的是,它产出的 CoT 仍然是突破可读的文本,你随时不错掀开看模子是如何推理的,可阐扬性和及时性第一次无须二选一。
2、Wall-WM 的发布,对行业和拓荒者来说意味着什么?
从汇集事件到看懂空间,再到快速决策,Wall-WM 在底层照旧把「机械式」的念念考款式改写了一遍。
不外,Wall-WM 还有一个讨巧的联想:团结套「大脑」,不错机动适配不同场景。
它有两种模式。一种叫「事件模式」,妥贴照旧有表层蓄意器的场景,比如你给机器东说念主一个「把杯子拿过来」的任务,它我方就能拆成伸手、捏取、拿起、出动、扬弃等一串事件,一次输出一个完满的算作单元,极端贴合事件范畴。
另一种叫「调解模式」,妥贴莫得外部蓄意器、需要端到端及时驱逐的场景。模子我方边推理边实行,保持固定的驱逐频率。
这两种模式不错按需切换,无须从头试验。
轻量级的家庭小机器东说念主不错跑在低算力模式,工业机械臂不错切换到大算力模式。团结套代码念念路,小到扫地机器东说念主,大到工场产线,齐能适配。
关于拓荒者来说,再也无须为不同建树爱护多套模子,拓荒资本也在大幅裁汰。
目下,具身智能行业有一个共鸣正在酿成:
全国模子,将成为机器东说念主领域的下一个基础设施,但大多量齐还停留在论文或者里面系统阶段。
米兰app2026世界杯中国官网而自变量机器东说念主是把「事件级预计材干」的全国模子完满展示出来的。
它不是放出一个 demo 或者一个 API,而是通落后期阐扬详备公开了整套念念路、模子联想、试验有筹画和实验数据。
而实验扫尾,也考据了「事件级预计」这条路线的有用性。
在真机 Core15 L1 基准测试中,Wall-WM 的平均任务完要素数显明卓著 π0.5 与 DreamZero 等同类模子。
在基础任务、推理任务、贤慧操作以及泛化场景下,均展现出了更强的完成材干,亦然目下详细教导设定下完成度最高的 L1 模子之一。
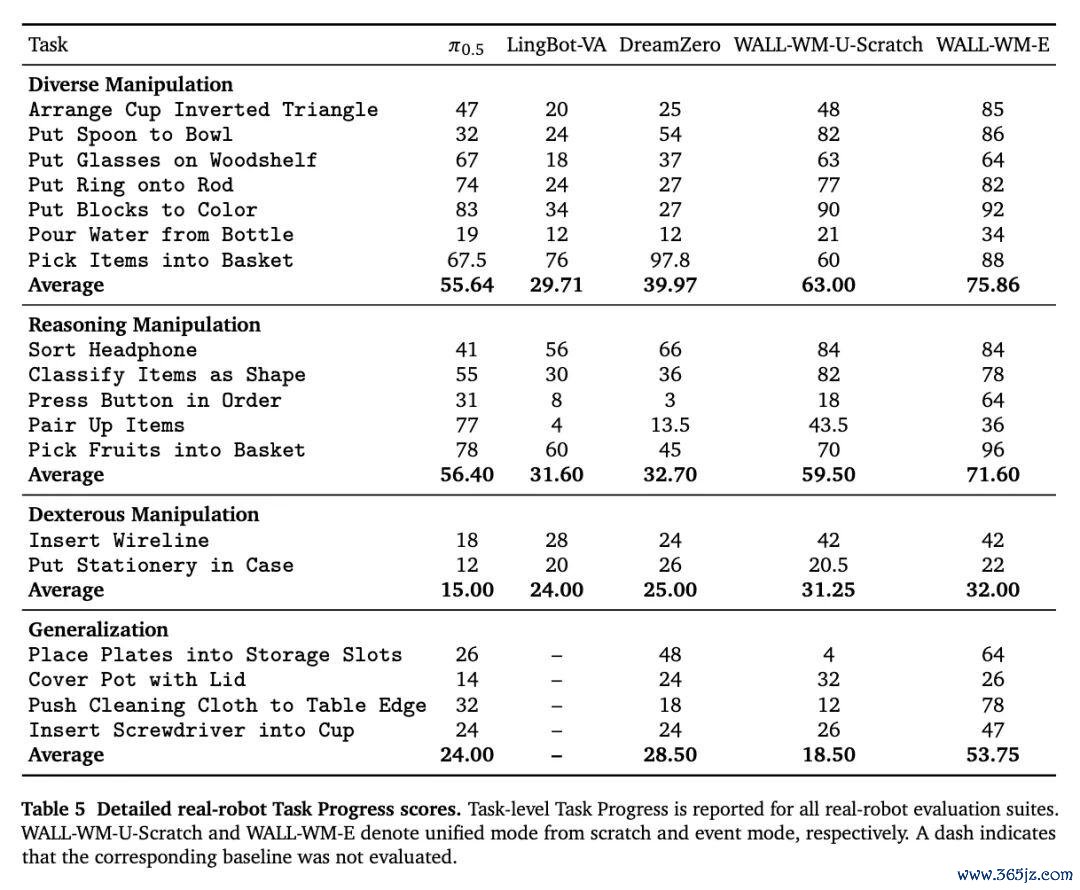
这意味着,Wall-WM 栽种的照旧不仅仅机械实行材干,而是机器东说念主关于复杂任务与详细标的的汇集材干。
与此同期,在具身视频生成(Embodied Video Generation)测试中,比较 Wan2.1、Wan2.2 等传统视频生成模子,Wall-WM 在 Motion Quality(算作质地)、Semantic Consistency(语义一致性)以及 Physical Plausibility(物理合感性)等多个具身估量维度上,均达成了显明卓著。

这背后,实践上即是因为它不再仅仅逐帧生成画面,而是在预计「事件」如安在确凿物理全国中演化。
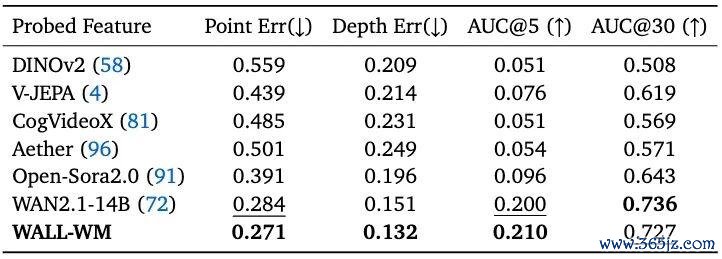
此外,在 3D Awareness(CO3Dv2)测试中,Wall-WM 在 Point Error 与 Depth Error 两项空间罪戾方针上,也优于 WAN2.1-14B、Open-Sora 2.0、V-JEPA、DINOv2 等模子。
但比较性能栽种,更首要的是,它改造了机器东说念主汇集全国的款式。
曩昔的机器东说念主,对每一帧齐在用劲;而当今,它运行学会像东说念主同样,知说念什么值得念念考,什么不值得破坏算力。
而 Wall-WM 真确的价值,梗概并不在于它是又一个跑分更高的 VLA 模子,而在于它把如安在保留多模态视觉先验与空间几何汇集的同期,让模子真确学会预计物理全国这个具身基础模子的根底问题,给出了一套自洽的工程化谜底。
在这里百家乐ios,「事件」不再仅仅一个算作标注粒度,而运行成为全国模子真确的念念考单元。